
Greifer und Greifwerkzeuge für Industrieroboter
Letzte Änderung: , Autor: EGS Automation, Fachartikel
Wenn man gemeinhin vom Robotergreifer oder Robotergreifwerkzeug spricht, klingt das zunächst ziemlich profan. In Wirklichkeit ist selbst das vermeintlich einfachste Konstrukt ein recht komplexes Greifsystem.
Es besteht aus dem eigentlichen Greifwerkzeug: einem pneumatischen oder elektrischen Greifelement oder Vakuumelement sowie entsprechenden werkstückspezifischen Formteilen, die mit den Bauteilen in Berührung kommen und diese sicher aufnehmen bzw. halten. Dies sind bei Greifern mit Hub sogenannte Greiferbacken, bei Vakuumgreifsystemen meist entsprechende Negativformen des Werkstücks oder von Teilen des Werkstücks.
Das zuvor beschriebene Greifwerkzeug benötigt einen Antrieb (Ventile für pneumatische Antriebe bzw. ein Servoverstärker für elektrische Greifer) oder einen Vakuumerzeuger für Vakuumgreifsysteme. Diese Einheiten werden meist auf der dritten Roboterachse (beim 6Achser) montiert, die für entsprechende Zusatzlasten ausgelegt ist.
In allen Fällen wird noch eine Versorgung mit Energie bzw. Steuersignalen sowohl zu den Antrieben, als auch von dort zu den eigentlichen Greifmodulen benötigt. Dabei handelt es sich um elektrische Leitungen oder Pneumatikschläuche. Hinzu kommen noch elektrische Leitungen um entsprechende Sensorik an den Greifwerkzeugen mit Energie zu versorgen und deren Ausgabesignale zurück zur Steuerung zu leiten. Diese gesamten Leitungen werden zum Medienpaket oder Schlauchpaket zusammengefasst und müssen entsprechend so verlegt werden, dass sie für alle erforderlichen Bewegungen des Roboters ausgelegt sind.
Die Medienversorgung von der ersten bis hoch zur dritten Roboterachse mit Luftleitungen bzw. elektrischen Adern ist in der Regel bei 6Achs-Robotern bis zu einem gewissen Maß bereits im Roboter standardmäßig verbaut.
Alles das ist bereits für das Aufnahmen/Ablegen eines Teils mit einem sogenannten 1fach Greifwerkzeug erforderlich. Dabei kommt insbesondere der Konstruktion und Ausführung der Greiferbacken eine für die Prozesssicherheit entscheidende Bedeutung zu. Zunächst müssen die Werkstücke sicher aufgenommen und positioniert werden. Gleichzeitig dürfen sie durch den Kontakt beim Greifprozess nicht beschädigt werden und drittens müssen Sie sicher und genau am Ablageort abgegeben werden.
Ebenfalls erheblich für die spätere Programmierung, Zugänglichkeit zum Prozess sowie zur Vermeidung von Problemen durch Singularitäten des Roboters ist der sogenannte Flansch. Er bestimmt, wie das Greifmodul geometrisch zum Roboterflansch angeordnet ist.
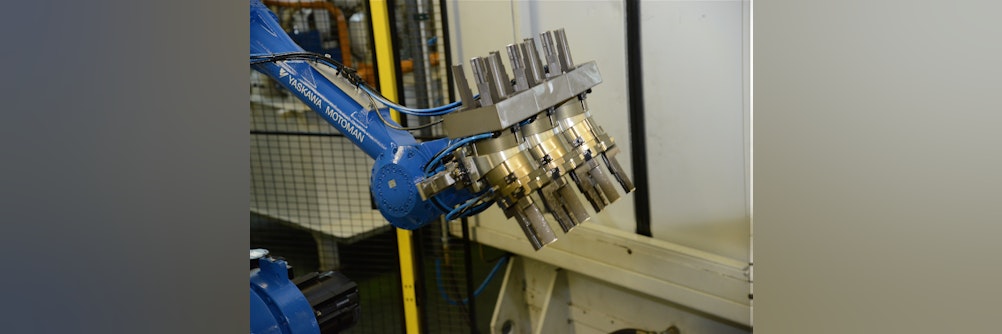
Sehr häufig werden mehrere Greifeinheiten bzw. Greifmodule in einem Greifwerkzeug verbaut. Dies kann mehrere Gründe haben.
Ein Beweggrund kann zum Beispiel sein, dass Bauteile unterschiedlicher Geometrie gegriffen werden sollen, die nicht mit einem Greifwerkzeug aufgenommen werden können.
Ebenso kann dies der Fall sein, wenn das Rohteil vor einer Bearbeitung sich so deutlich vom Fertigteil nach der Bearbeitung unterscheidet, dass die Einzelgreifer auf unterschiedliche Geometrien ausgelegt sein müssen.
Es kann aber auch schlicht und ergreifend der Sauberkeit eines Werkstückes dienen. Soll ein verunreinigtes Werkstück einem Reinigungsprozess zugeführt werden und danach wieder entnommen werden, wird oft ein Doppel-Greifwerkzeug mit einem Greifmodul für saubere und einem weiteren für die verunreinigten Bauteile verwendet.
Ein sehr häufiger Beweggrund für einen Doppel - oder Mehrfachgreifer in einem Handhabungsprozess ist die Reduzierung der Maschinenstillstandszeit und damit die Optimierung der Nebenzeit. Steht ein Fertigteil nach einer Bearbeitung in einem Prozess oder einer Maschine an der gleichen Position zur Abholung bereit, wo das unbearbeitete Rohteil abgelegt werden soll, muss das Fertigteil zunächst entnommen werden, bevor das Rohteil eingelegt werden kann. Hier können mit der Verwendung eines Doppelgreifwerkzeuges zwei Wege (aus der Maschine zum Werkstückspeicher und zurück) und damit teure Nebenzeit einer Maschine eingespart werden. Der Roboter bringt das neue Rohteil beim Einfahren in die Maschine gleich mit, nimmt mit dem leeren Greifmodul das Fertigteil, orientiert das Greifwerkzeug um, setzt das neue Rohteil in der Maschine ein und fährt aus und die nächste Bearbeitung beginnt.... (vollständigen Text über den Button "Mehr Info dazu")
Weitere Informationen
Industrieroboter Ventile Sensorik Antriebe Greifsysteme Robotergreifer Vakuumgreifer Sauggreifer