
SLURBT ⚡ die Achsen eines Roboters
Letzte Änderung: , Autor: EGS Automation, Fachartikel
Yaskawa verwendet bei der Bezeichnung der Drehachsen eines Roboters die Buchstaben SLURBT. Warum ist das so und was bedeutet es wird in diesem Artikel beschrieben.
Warum werden bei Knickarmrobotern die Achsen beschriftet?
Die Drehachsen von sechsachsigen Knickarmrobotern werden von der unterschiedlichen Herstellern auf verschieden Art und Weise bezeichnet.
Beim Programmieren von Robotern kommt es vor, dass man Achsen einzeln bewegen muss, und daher braucht man genaue Achsbezeichnungen.
Die Bezeichnungen der Einzelachsen von Industrierobotern mit 6 Achsen
Der 6Achs-Knickarmroboter ist eine serielle Kinematik, deren Achsen in Wirkrichtung hintereinander angeordnet sind.
Oftmals wird einfach von unten nach oben durchnummeriert und die Ziffer hinter einen Buchstaben gesetzt, der für den Begriff Achse in unterschiedlichen Deutungen steht (z. B. A1-A6, J1-J6 oder R1-R6).
Unser Roboterpartner Yaskawa hat eine ganz eigene Achsbezeichnung die, von unten nach oben gesehen, das Wort SLURBT ergibt.
Was zunächst unnötig kompliziert anmutet, ergibt bei näherer Betrachtung durchaus Sinn. So steckt doch hinter jedem der Buchstaben eine Wort, dass die Funktion der jeweiligen Achse in englischer Sprache beschreibt und damit die Zuordnung der Buchstaben zu den Achsen einfach macht.
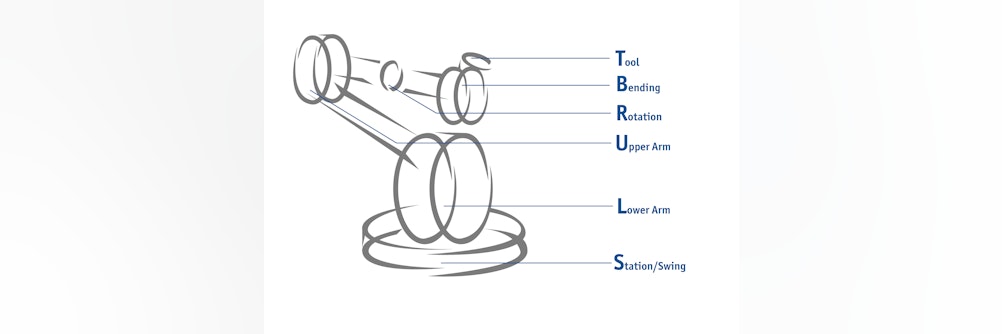
Dabei steht S für Station oder Swing, also die unterste Hauptachse, die die Basis des Roboters darstellt bzw. für das Schwingen des gesamten Armes verantwortlich ist.
Das L für die zweite Achse von unten steht für Lower Arm, also die untere der beiden Hauptachsen, die den gesamten Arm kippen.
Das U für die dritte Achse von unten steht für Upper Arm, also die obere der beiden Hauptachsen, die den gesamten Arm kippen.
Diese erstgenannten drei Achsen werden als Hauptachsen bezeichnet, da sie ersten die drei stärksten Achsen sind und zweitens den Haupanteil an raumgreifenden Bewegungen des Roboters übernehmen.
Kommen wir zu den Handachsen, die für die Bewegungen des Oberarms verantwortlich sind.
Die 4. Achse von unten ist mit R bezeichnet, was für Rotation steht. Sie dreht den gesamten Oberarm.
Am vorderen Teil des Handgelenkes folgt dann als 5. Achse die B-Achse, die für das Beugen oder Bending des Handgelenkes verantwortlich ist.
Und last but not least folgt als 6. Achse, die an der das Werkzeug, also das Tool montiert ist und die daher T-Achse heißt.
Zusammengefasst also:
✏️S=Station oder Swing
✏️L=Lower Arm
✏️U=Upper Arm
✏️R=Rotation
✏️B=Bending
✏️T=Tool
Relevanz beim Programmieren von Robotern
Bei Programmieren von Robotern werden nur selten einzelne Achsen bewegt. In der Regel werden alle Achsen in Bezug auf den TCP (Tool-Center-Point) von der Robotersteuerung interpoliert und der Programmierer bewegt sich in einem kartesischen Koordinatensystem
Wie machen es andere Roboterhersteller?
Bei Kuka werden die Achsen von unten nach oben durchnummeriert und stellt den Ziffern ein A für Achse voran.
Fanuc stellt macht es ähnlich und stellt noch ein J vor jede Ziffer für das Wort Joint
Weitere Informationen
Automatisierungstechnik Roboterautomation Robotersteuerung Knickarmroboter