
Positioniersystem mit Zahnriemenantrieb für geringen Bauraum
Letzte Änderung: , Autor: IEF-Werner, Fachartikel
IEF-Werner: Zahnriemenachse ermöglicht kompaktes Pick & Place-System für Handhabung unterschiedlicher Bohrwerkzeuge
Um unterschiedlich große Bohrer mit wenigen Millimetern Schaftdurchmesser nacheinander schnell und präzise aus einem Werkstückträger zu entnehmen, einem Beschriftungslaser zuzuführen und sie anschließend wieder in einen Werkstückträger abzulegen, setzt ein Hersteller auf eine vollautomatische Pick & Place-Anlage von IEF-Werner. Für das Positioniersystem verbaute der Automatisierungsspezialist unter anderem die Linearachse der Baureihe 160/15 G. Diese Zahnriemenachse ist mit zwei unabhängig voneinander verfahrbaren Schlitten ausgestattet. Weil somit für die beiden Greifeinheiten keine zwei Achsen erforderlich sind, lässt sich nicht nur eine schnelle, sondern auch eine kompakte Anlage umsetzen.
Das Laserbeschriften hat im Vergleich zu anderen Kennzeichnungsverfahren einige Vorteile – beispielsweise sind die Verbrauchskosten niedriger und die Wartungsaufwendungen geringer. Aber vor allem ist es eine Möglichkeit, Bauteile aus ganz unterschiedlichen Materialien sehr schnell zu kennzeichnen. „Um diesen Zeitvorteil bei hohen Stückzahlen umfassend zu nutzen, müssen die Werkstücke auch entsprechend rasch dem Laser zugeführt werden können“, sagt Thomas Hettich, Produktmanager bei IEF-Werner aus Furtwangen im Schwarzwald. Er spricht damit ein Projekt an, bei dem sich ein Werkzeughersteller genau mit dieser Anforderung an den Automatisierungsspezialisten wandte. Die Aufgabe: Bohrwerkzeuge mit Schaftdurchmessern von 3,5 bis 25 Millimetern aus Hochleistungsschnellstahl HSS-E und aus Vollhartmetall (VHM) sollten aus kundenseitigen Werkstückträgern nacheinander entnommen, einem Beschriftungslaser zugeführt und anschließend wieder in einen Werkstückträger abgelegt werden – und das äußerst schnell und präzise. „Werkzeuge mit Schaftdurchmessern kleiner sechs und ab 16 Millimeter beschriftet der Laser einseitig, die Größen dazwischen beidseitig“, erklärt Hettich. Das komplette Handling hatte vollautomatisch zu erfolgen.
Bauteile effizient zuführen
Basis der Pick & Place-Anlage ist das erweiterbare Gurtbandsystem posyART. Das zuverlässige, flexible und präzise Baukastensystem enthält viele Standardkomponenten, mit denen sich so gut wie alle Aufgaben im Transfer-, Montage- und Logistikbereich lösen lassen. Die Hauptkomponenten wie Riemen, Antriebe, Weichen oder Stoppelemente sind sehr langlebig. Die Schwalbenschwanz-Geometrie an den Längsseiten der Profile erlaubt ein feinfühliges, stufenloses Positionieren der angefügten Baugruppen. „Das System haben wir mit Aufnahmen ausgestattet, welche die kundenseitigen Werkstückträger (WT) tragen können“, sagt Hettich. Seitenpositionierung, Zentrierstation sowie eine Hub- und Dreheinheit bringen die WT in die richtige Lage. In der Zentriereinheit werden sie mittig platziert und anschließend dreidimensional mit einer Genauigkeit von +/- 0,05 Millimetern fixiert. Die Stopper sind zentral angeordnet. Das verhindert ein Verkanten der Werkstückträger in den Führungsleisten. Für diese Anwendung hat der Werkzeughersteller die WT mit einem Datamatrixcode versehen. Hinter diesem Code verbergen sich Informationen über den Werkzeugträgertyp, die Anzahl und die X/Y-Koordinaten seiner Löcher, die Schaftdurchmesser und die Trägerhöhe. An der Anlage setzt ein Mitarbeiter den WT mit den Bohrern auf einen Grundträger des Gurtbandsystems auf. „Es ist unbedingt erforderlich, dass die Werkstückträger innerhalb eines Auftrags baugleich sind“, betont Hettich. Am Bedienfeld gibt der Mitarbeiter den Auftrag ein, die Anzahl der WT – und ob die zu markierenden Bohrer eine Spannfläche besitzen oder nicht. Bei Anlagenstart liest das System zunächst die Beschriftungsdaten für den Laser. Ein Scanner erkennt den Datamatrixcode und das Gurtbandsystem fährt den WT in die Entnahme-Station. Dort hebt es den WT vom Gurtband ab und zentriert ihn. Die Lineareinheit fährt in Y-Richtung das Raster des jeweiligen Werkzeugträgertyps ab. Die Lineareinheit positioniert den WT nun so, dass ein Lasermesssystem die erste Zeile des Werkzeugträgers erfasst. Eine Abstandsmessung erkennt, in welcher Rasterposition sich das aktuell zu bearbeitende Werkzeug befindet. Diese Position gibt der Sensor an die Steuerung weiter.
Präzises und schnelles Handling
Für die unterschiedlichen Bohrer sind abhängig von der Beschriftungsdauer bestimmte Taktzeiten für das Handling vorgegeben. „Bei Werkzeugen aus HSS-E soll der Gesamtprozess bei der einseitigen sieben und bei der doppelseitigen Beschriftung 14 Sekunden betragen“, erläutert Hettich. „Bei den VHM-Werkzeugen sind es vier und acht Sekunden.“ Um eine passende Handhabungstechnik umzusetzen, konstruierten die IEF-Ingenieure ein Positioniersystem aus standardisierten Lineareinheiten. Den Entwicklern steht dazu eine breite Produktpalette ausgereifter Automatisierungskomponenten zur Verfügung, mit denen sie Prozesse sehr effizient gestalten können. Dazu gehören verschiedene Linearachsen, die je nach Anforderungen an Dynamik, Präzision, Wiederholgenauigkeit oder auch an Schnelligkeit entsprechend ausgewählt werden. „Mit unseren Linearachssystemen und den standardisierten Verbindungselementen erstellten wir schnell und kostengünstig ein geeignetes Positioniersystem, das genau auf die Aufgabe und den zur Verfügung stehenden Platz beim Anwender zugeschnitten ist“, betont Hettich. Denn von zentraler Bedeutung bei der Umsetzung dieser Anlage waren unter anderem die Baulänge sowie das Antriebskonzept der Linearachse, auf der die beiden Greifeinheiten verfahren.
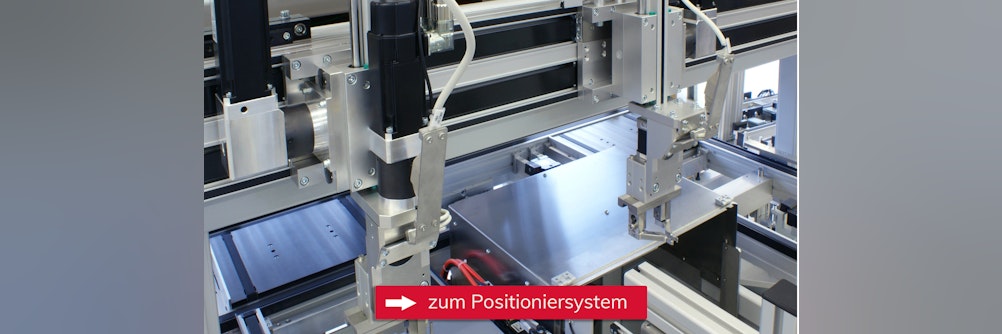
Platz sparen: Zwei Schlitten auf einer Achse
Aufgrund dieser Rahmenbedingungen kommt hierbei das Modul 160/15 G zum Einsatz. Die Variante „G“ zeichnet sich dadurch aus, dass die Zahnriemenachse mit zwei unabhängig voneinander verfahrbaren Schlitten ausgestattet ist. Dabei werden zwei getrennte Zahnriemen mittels eigenständiger Motoren angetrieben. Das spart erheblich Bauraum. „Um die geforderte Taktzeit zu erreichen, hätten zwei Lineareinheiten nebeneinander angeordnet werden müssen. Durch das innovative Antriebskonzept genügt nun eine Einheit“, so Hettich. Das Modul 160/15 G ist so positioniert, dass eine Greifeinheit auf je einem Schlitten befestigt ist. Dies führt zu einer erheblichen Reduzierung des benötigten Bauraums. „Damit können wir die Bauteile sehr schnell der eigentlichen Aufgabe zuführen, dem Laserbeschriften“, erläutert Hettich.
Automatisierungstechnik Transportsysteme Abstandsmessung Pick Place Zahnriemenantriebe Handhabungseinheiten